

非标自动设备设计
高技术的机器人顶端手臂工具(机器人抓手)
执行机器人自动化的主要任务,通过机械应用操作执行的基本的指定,机器人自动化一般是通过机器人有创造性的手臂或者抓手/工具置换设备来完成作业任务
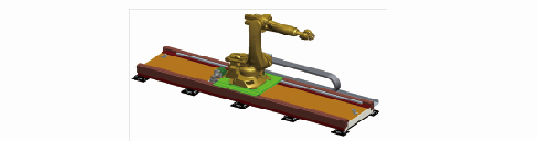
机器人导轨(行走机构单元)
由进口精密减速机,精密伺服,齿轮齿条进行传动,配合精密的加工装配工艺,有效保证行走重复定位精度及使用寿命,可应用于多种场合的机器人行走单元。
变位机

【返回】
高技术的机器人顶端手臂工具(机器人抓手)
执行机器人自动化的主要任务,通过机械应用操作执行的基本的指定,机器人自动化一般是通过机器人有创造性的手臂或者抓手/工具置换设备来完成作业任务
机器人导轨(行走机构单元)
由进口精密减速机,精密伺服,齿轮齿条进行传动,配合精密的加工装配工艺,有效保证行走重复定位精度及使用寿命,可应用于多种场合的机器人行走单元。
变位机

上海楷新机器人自动化设备有限公司
上海总公司 电话:021-67676286 传真:021-67676500
地址:上海市漕河泾开发区松江高科技园区双子楼A座2104室
生产基地 电话:0510-86883893 传真:0510-86883893
地址:江苏省无锡市江阴市申港街道港城大道988号15-3
Copyright © 2008-2020 上海楷新机器人自动化设备有限公司 All Rights Reserved